





Revolutionizing Tunnel Safety with Autonomous Four-Legged Robots in Construction
Introduction
In a groundbreaking initiative aimed at enhancing safety during mountain tunnel construction, Koike Corporation, headquartered in Osaka, has collaborated with Pocket Queries, based in Shinjuku, Tokyo. Together, they successfully conducted a demonstration experiment on February 8, 2026, where an autonomous four-legged robot was deployed to explore and observe hazardous areas, significantly improving safety protocols in such challenging environments.
The Challenge of Tunnel Construction
Mountain tunnel construction poses a multitude of risks, including rock falls, collapses, and the release of combustible gases. To effectively monitor and assess the geological conditions, excavation workers need to observe the cutting face. However, the dangers involved necessitate safer alternatives. Koike Corporation and Pocket Queries focused on developing an observation system utilizing four-legged robots, allowing for accurate monitoring while ensuring the safety of the crew.
How the Robot Operates
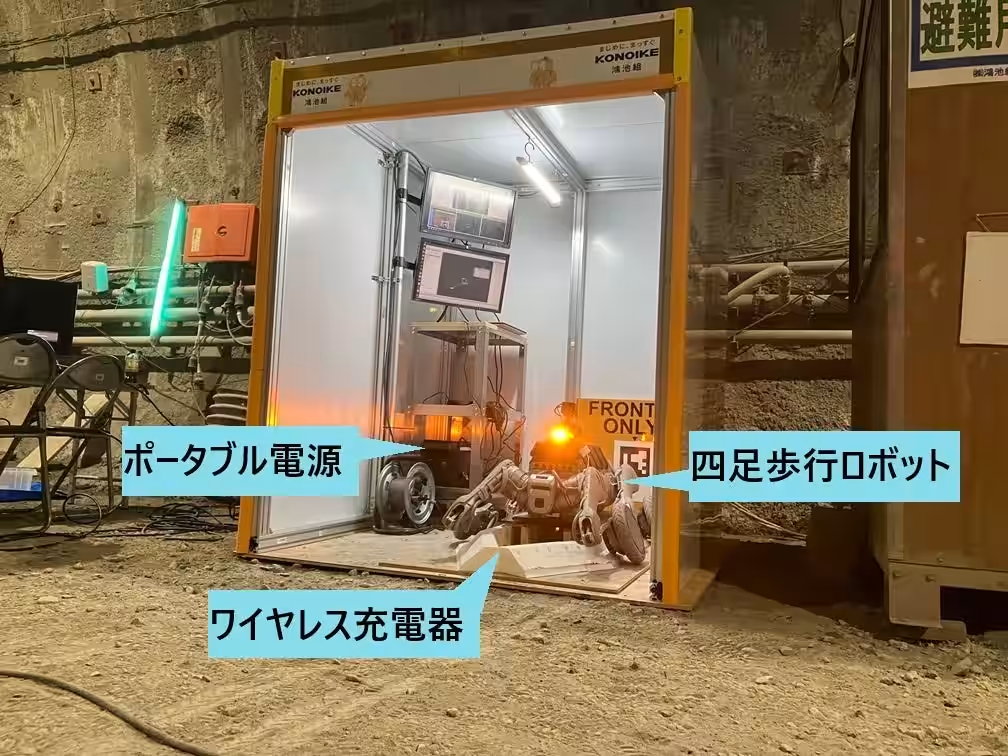
The process begins at the launch station, located approximately 60 meters from the excavation’s deepest point. Here’s how the robot performs its tasks:
1. Initial Launch: The robot is activated at the launch base, preparing for deployment toward the target observation area.
2. Environment Scanning: It navigates to the starting point, scanning the surroundings and recording spatial data about its location and any obstacles in a 3D format.
3. Autonomous Movement: After assessing its environment, the robot begins its autonomous walk towards the excavation front, avoiding obstacles based on its spatial analysis.
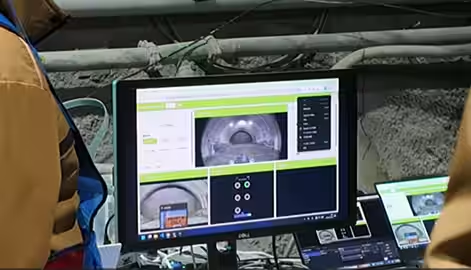
4. Data Collection: Once it reaches a pre-defined observation point, the robot automatically halts, allowing for an in-depth inspection of the excavation face and collection of environmental data.
5. Return Journey: After completing the observations, the robot refers to the spatial data recorded during its outbound journey to retrace its steps back to the launch base.
The launch station is equipped with a charging function, enabling the robot to recharge between operations, thus ensuring continuous deployment.
Features of the Robot
The four-legged robot used in this experiment is based on Unitree’s B2-W model, designed to navigate autonomously by detecting its surroundings. It is equipped with:
- - Sensor Systems: Including a 3D LiDAR for spatial recognition and obstacle detection, and gas sensors for monitoring methane, oxygen, hydrogen sulfide, carbon monoxide, and carbon dioxide levels.
- - Camera Systems: A gimbal camera for high-precision imaging and a POV camera for remote monitoring.
- - Control Systems: A control PC for processing sensor data and managing movements.
- - Communication Systems: A communication module for remote operation and monitoring.
- - Safety Devices: Flashing lights to enhance visibility in the surrounding area.
Results of the Experiment
During the experiment, the robot was set to stop 15 meters before the deepest point of the tunnel. Upon arrival, it conducted a range of observations including assessing weathering, groundwater presence, and gas detection. This remote oversight allowed for the collection of environmental data without putting human workers at risk. The robot returned through the same path after gathering all necessary information, demonstrating that it could maintain precision on par with traditional visual inspections while bolstering worker safety.
Future Prospects
Looking ahead, Koike Corporation and Pocket Queries aim to refine the system to adapt to more complex geological conditions and ensure stability during prolonged operations. Their ongoing efforts focus on developing this technology for real-world application, thus contributing significantly to enhancing safety and efficiency in mountain tunnel construction projects.
Conclusion
The collaborative effort between Koike Corporation and Pocket Queries marks a step forward in leveraging robotics for safer construction practices. As they continue to innovate and improve autonomous systems, the future of tunnel construction looks increasingly secure.


Topics Other)




【About Using Articles】
You can freely use the title and article content by linking to the page where the article is posted.
※ Images cannot be used.
【About Links】
Links are free to use.