




RLWRLD Unveils All Hands Up! Platform for Robot Hand Analysis
RLWRLD Launches Innovative Robot Hand Analysis Platform
In a groundbreaking development, RLWRLD has introduced the All Hands Up! platform, designed to analyze and visualize the performance of various dexterous robot hands based on operational data. The initiative aims to address the common question in research and industry: "Which robot hand performs effectively in real environments?" By leveraging real-world operational data, All Hands Up! presents a clearer understanding of design trade-offs and practical limitations for robot hand functionality.
Defining the Trade-Offs in Robot Hand Design
Robot hands are considered essential components in the realm of Physical AI. However, the inherent structural trade-offs between size, gripping strength, and back-drivability complicate the development of a perfect product. These trade-offs emerge from the following relationships:
1. Size vs. Gripping Strength: Reducing the size of a robot hand necessitates smaller internal motors, which subsequently reduces gripping strength.
2. Gripping Strength vs. Back-Drivability: Enhancing gripping strength often involves increasing the gear ratio, which leads to a decline in the hand's ability to respond flexibly to external forces and impacts, a property known as back-drivability.
This balancing act demonstrates that enhancing one feature can adversely affect another, leading to limitations in current commercial products which often exhibit inherent trade-offs depending on their design objectives.
Introducing DexBench for Objective Performance Metrics
To provide a more accurate assessment of robot hand capabilities, RLWRLD has organized critical design variables influencing task performance. These variables include:
- - The mobility range of the thumb (Kapandji Scale)
- - The independence of the distal interphalangeal (DIP) joint movements
- - The minimum gripping diameter (the smallest object the robot hand can grasp)
- - The friction characteristics of the hand's exterior materials
Additionally, by utilizing a proprietary benchmark called DexBench, RLWRLD quantitatively evaluates the characteristics and limitations of different robot hands within 18 practical operational tasks.
A Dual Hardware Strategy to Address Realities in Robotics
Acknowledging that a perfect robot hand does not yet exist, RLWRLD proposes a dual-hardware strategy tailored to specific use cases:
- - Type 1 (Field Deployment): A structure that prioritizes lightweight and high durability for practical applications in industrial environments.
- - Type 2 (Data Collection for AI Learning): A design that features high back-drivability and precision for detailed operations and data gathering necessary for AI training.
Employing these complementary types is believed to be the optimal approach in the current landscape of robot hand development.
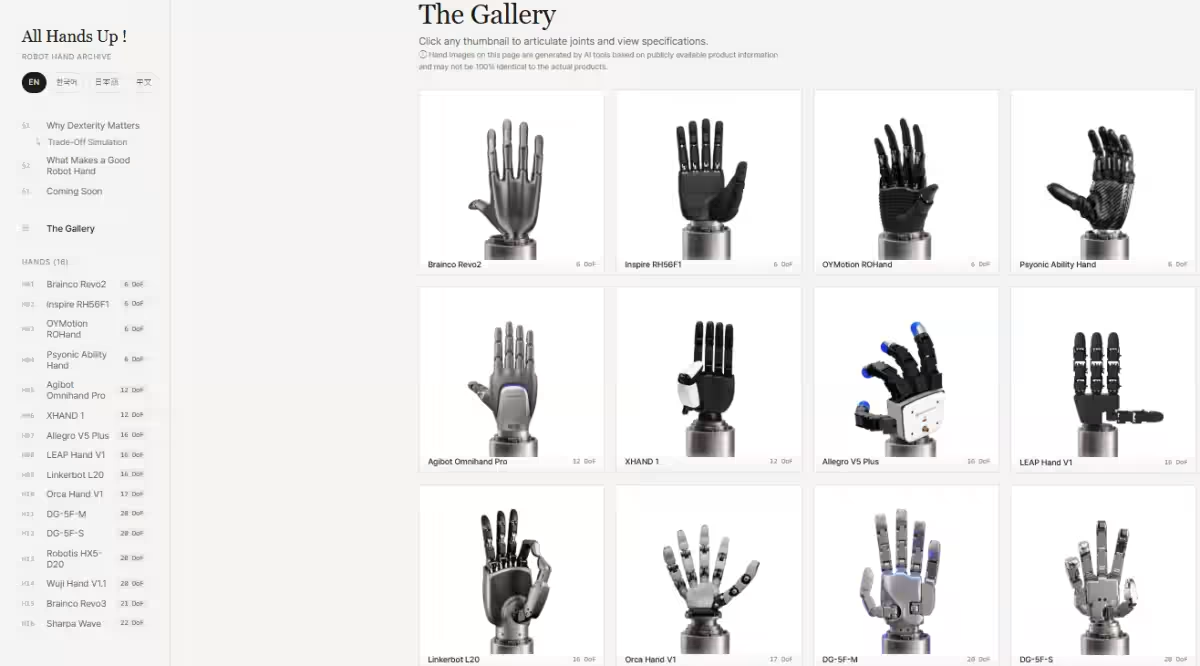
Interactive Visualization Features on All Hands Up!
The All Hands Up! platform offers interactive visualization tools based on URDF (Universal Robot Description Framework) for users to assess robot hands without the need for expensive specialized software. Users can manipulate the joints of multiple robot hands through a web browser interface, testing whether their desired gripping shape can be achieved. Furthermore, the site allows for direct comparisons of key specifications among products, and users can access URDF data applicable for actual robot simulations and developments (currently featuring data from over ten types of dexterous robot hands).
Insights from RLWRLD’s CEO, Ryu Jun-Hee
Ryu Jun-Hee, CEO of RLWRLD, remarked, “All Hands Up! is not just a product comparison website but an open platform that shares real operational data of robot hand technology across the industry. We aim for quarterly updates to continuously accumulate the latest data on robot hand performance. This will enable manufacturers to validate their designs while researchers and industry partners can establish clear benchmarks for robot hand adoption. By providing a common reference point, we contribute to the advancement of the robot hand development ecosystem.”
About RLWRLD
Established in 2024, RLWRLD is a Physical AI company focused on creating a Robotics Foundation Model (RFM) that implements human-like hand movement and cognitive abilities in machines. With offices in the United States, South Korea, and Japan, RLWRLD is at the forefront of technology that enables robots to perceive, understand, and act like humans through its unique system for collecting and learning high-precision 4D+ multimodal industrial data. Currently, they are commercializing their innovations through pilot projects with major companies in Korea and Japan, aiming to become a global leader in AI for industrial robotics.
For more information, visit All Hands Up! or RLWRLD's Official Site.

Topics Consumer Technology)



【About Using Articles】
You can freely use the title and article content by linking to the page where the article is posted.
※ Images cannot be used.
【About Links】
Links are free to use.