




Transformable Lunar Robot SORA-Q Validates Autonomous Exploration Success
Introduction to SORA-Q
The transformable lunar robot, Lunar Excursion Vehicle 2 (LEV-2), affectionately named SORA-Q, has made significant strides in autonomous lunar exploration. A recent paper summarizing its research outcomes has been accepted and featured on the cover of the prestigious international journal, Science Robotics, published on June 10, 2026 (Japan time). This development marks a notable achievement in the field of robotic exploration, indicating a new paradigm in how we can approach extraterrestrial terrain.
Key Highlights of the Research
The study shines a spotlight on several groundbreaking advancements:
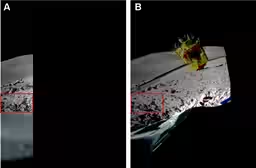
- - New lunar images captured by LEV-2, demonstrating its mobility on the lunar surface.
- - A unique transformation method enabling the robot to shift from a spherical form to a rover, validating the viability of a palm-sized robot for lunar navigation.
- - A demonstration of autonomous control technology allowing it to move, capture images, and communicate independently, without relying on ground-based remote control.
- - Evidence of the potential for low-cost and rapid development of small robotic systems for future space exploration missions.
Overview of LEV-2's Journey
In January 2024, LEV-2 detached from the small lunar lander, SLIM, and successfully reached the moon's surface. The robot autonomously transformed from a sphere, approximately 8 cm in diameter, into a moving rover. It captured images of its surroundings and successfully transmitted the collected data through wireless communication, all performed without ground control.
This research tackles the challenges associated with small robotic systems, particularly those regarding mobility and processing capabilities. The innovative design of LEV-2's mechanical structures and its autonomous control technology have proven effective on the lunar surface.
Background of the Research
Historically, lunar and Mars explorations have relied on large, high-performance rovers, which are expensive to develop and launch. In contrast, smaller rovers offer advantages in cost-effectiveness but come with limitations in mobility, processing ability, and power management. Particularly in soft lunar soil, smaller wheels are prone to sinking, complicating movement. Furthermore, reliable autonomous navigation is crucial in environments where communication may be inconsistent or weak, highlighting the need for robots like LEV-2 that can operate independently.
Research Findings
The execution of this research yielded several critical results that further our understanding of autonomous lunar exploration:
1. Demonstration of Complete Autonomy: LEV-2 spontaneously activated and deployed after landing, managing to navigate away from its lander while capturing photographs autonomously. The robot selected pertinent images for transmission, underscoring its capability to operate independently in a limited communication environment. It successfully captured two images from the lunar surface, providing valuable data about the landing situation.
2. Verification of Mobility via Transformative Mechanism: LEV-2's unique design, featuring a transformation from a ball to a rover and equipped with eccentrically rotating wheels, proved successful. Image analysis of the captured photographs indicated that LEV-2 moved approximately 0.13 meters and rotated approximately 180 degrees during its exploration.
3. Insights on Operation in Actual Environments: The mission revealed challenges such as communication disruptions and data loss. However, LEV-2's embedded anomaly detection and self-recovery functionalities exhibited effective responses to any encountered issues. This not only validates its operational integrity but also establishes key insights for future small robotic missions in space environments.
Prospective Developments
The findings of this research indicate a promising trajectory for future space exploration using small robotic systems. Several avenues for development can be anticipated:
- - Enhanced systems for deploying multiple small robots simultaneously for more efficient exploration of extensive areas.
- - Integration of large rovers and smaller robots to create flexible exploration systems.
- - Expansion of exploration capabilities to challenging terrains such as caves and steep slopes.
- - Accelerated timelines for low-cost missions leading to more rapid advancements in space exploration.
Through this research, the technology developed and the insights gained have the potential to significantly benefit upcoming missions to the Moon, Mars, and beyond, contributing to the overall growth of human activities in space.
Additional Information
- - Journal: Science Robotics
- - DOI: 10.1126/scirobotics.aec8039
- - Authors: D. Hirano, M. Inazawa, M. Sutoh, M. Nagata, Y. Yoneda, K. Watanabe, H. Sawada, G. Sakoda, S. Abe, S. Homma
The project was a collaborative effort involving the Japan Aerospace Exploration Agency (JAXA), Takara Tomy Co., Sony Group Corporation, and Doshisha University. Launched on September 7, 2023, as part of the SLIM mission aboard the H-IIA rocket from the Tanegashima Space Center, LEV-2 has set records as the smallest and lightest lunar exploration robot, achieving autonomous operations previously thought unattainable.


Topics Consumer Technology)

【About Using Articles】
You can freely use the title and article content by linking to the page where the article is posted.
※ Images cannot be used.
【About Links】
Links are free to use.