Bestat Enhances 3D Reconstruction Stability with Innovative SLAM Algorithm




Bestat Enhances 3D Reconstruction Stability with Innovative SLAM Algorithm
Bestat Inc., based in Bunkyo, Tokyo, has taken a significant step forward in the realm of 3D data processing. The company has recently revamped its 3D data cloud service, 3D.Core, by implementing a state-of-the-art SLAM (Simultaneous Localization and Mapping) algorithm for Structure from Motion (SfM). This new feature not only utilizes the Visual-Inertial SLAM (VI-SLAM) from Apple’s ARKit but also incorporates a unique relative pose estimation to address the common challenges faced by traditional methods.
The Challenges in 3D Data Generation
As demand for 3D data utilization continues to grow in manufacturing and infrastructure sectors, the need for reliable digital twin creation has surged. Technologies that leverage laser scanners, drones, and smartphones have increasingly become prevalent in capturing 3D data. However, these methods have been plagued with issues such as:
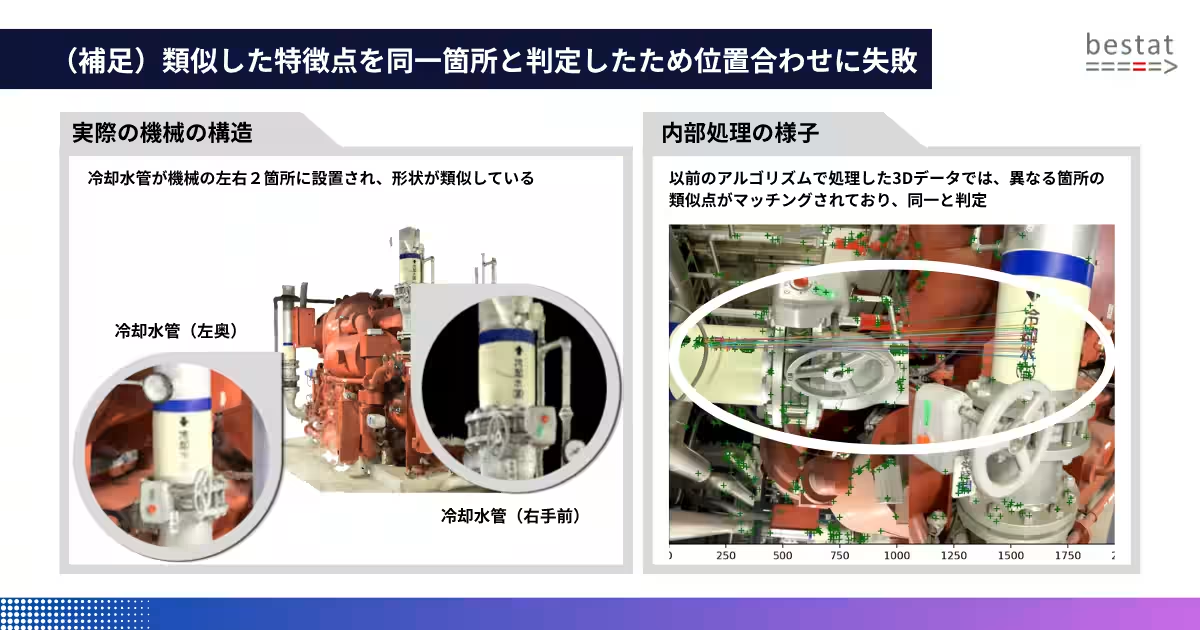
- - Merging similar sections incorrectly, leading to model breakdowns.
- - Missing sections of data even after shooting.
Such issues are particularly pronounced in environments dense with artificial structures like manufacturing plants and infrastructure sites. The new SLAM-based SfM algorithm significantly reduces the occurrence of these problems, thereby enhancing the overall reliability and stability of 3D data generation.
Innovating with New Algorithms
Previously, while using ARKit’s VI-SLAM offered stable tracking capabilities, it was also prone to the accumulation of positioning errors over time. The newly implemented algorithm combines the positional data from ARKit with Bestat's proprietary relative pose estimation to effectively mitigate these errors while maintaining stability.
The introduction of this sophisticated algorithm leads to several key advancements:
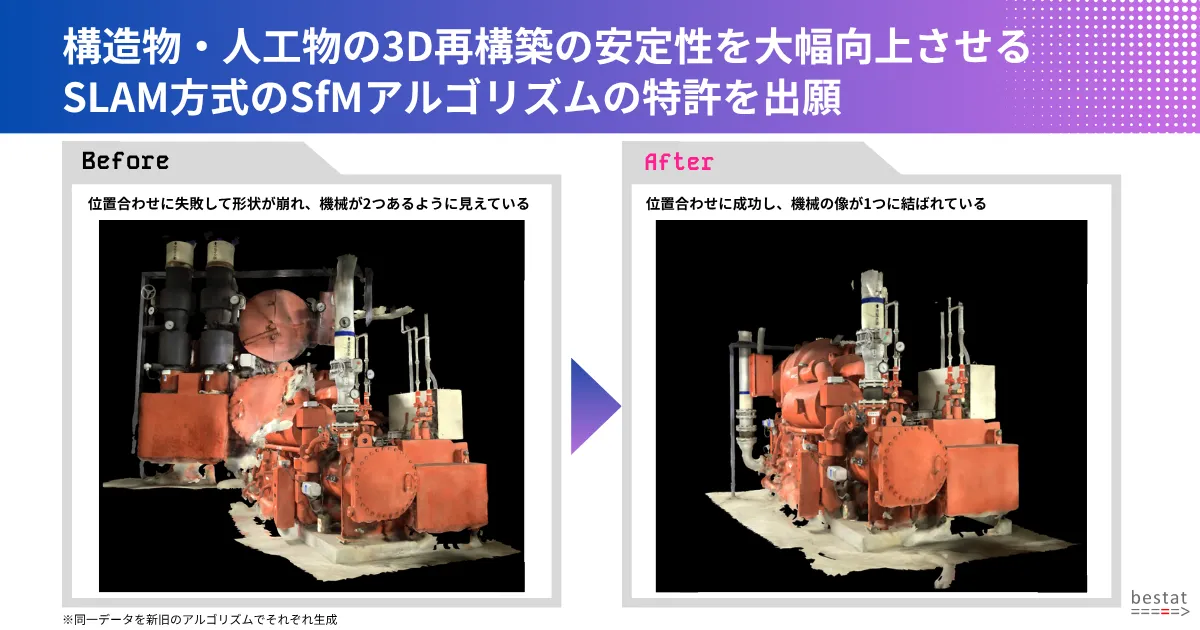
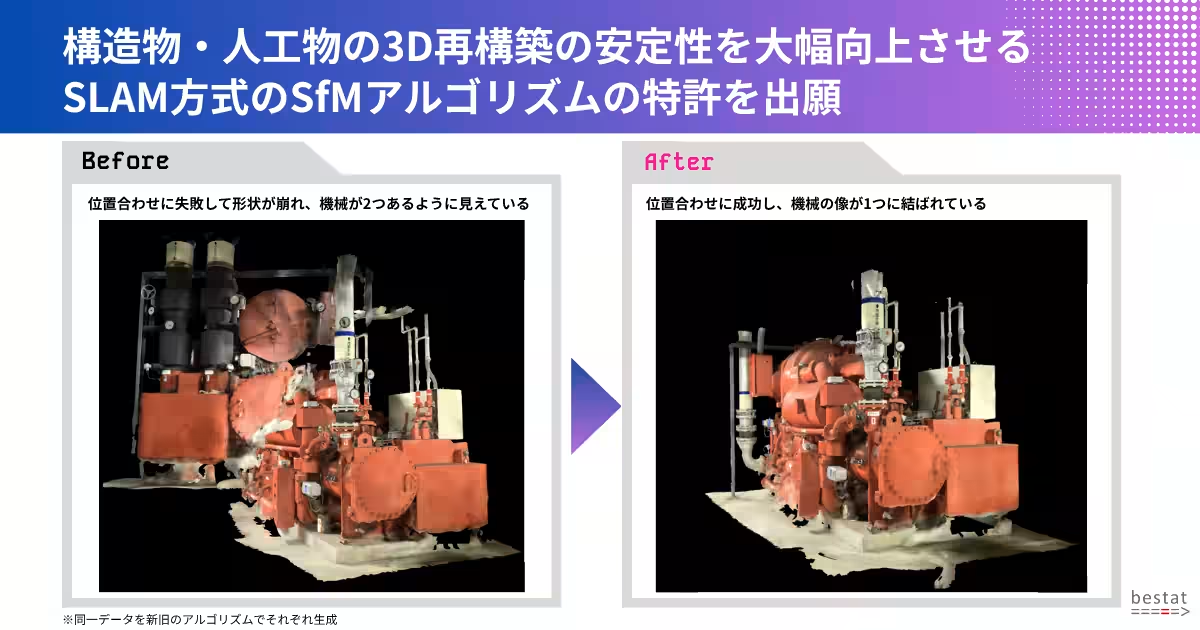
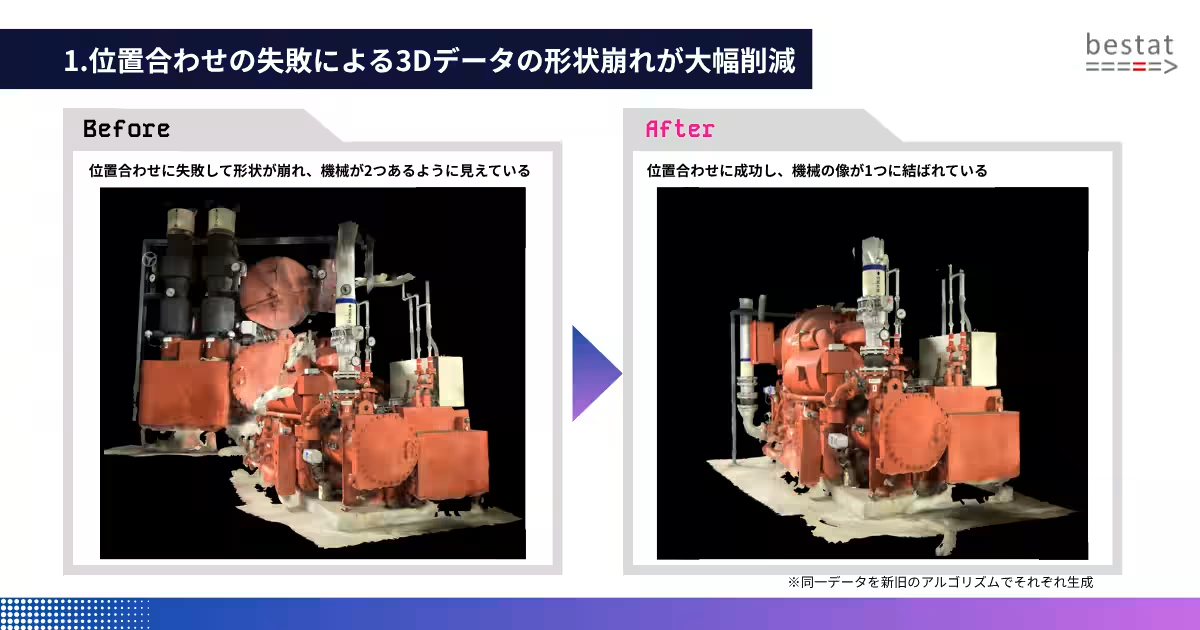
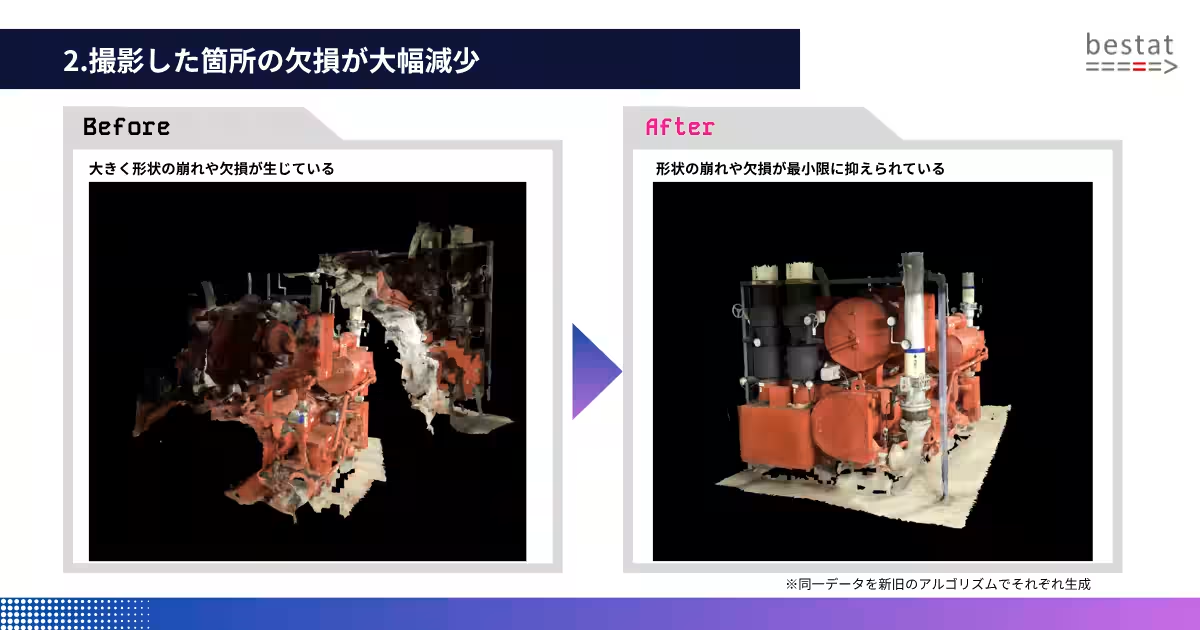
- - Reduced Occurrence of Catastrophic Alignment Failures: A notable reduction in scenarios where the entire 3D model collapses, thus enhancing overall data integrity.
- - Decreased Missing Data: A significant drop in instances where previously captured images do not generate corresponding 3D data.
To visualize these improvements, Bestat has provided comparative visual aids demonstrating the results achieved with both the old and new algorithms.
Technical Features of the New Algorithm
The core of Bestat's new algorithm exploits the positional data provided by ARKit’s VI-SLAM system—combining visual inputs with inertial measurement unit (IMU) data—while implementing best practices from their own relative pose estimation to correct cumulative errors. This innovation allows for stable 3D generation under conditions where traditional SfM techniques often falter:
- - Close-range capturing of artificial structures and equipment with limited feature points.
- - Scanning of expansive artificial environments.
- - Irregular shooting sequences.
It’s worth noting that while the quality improves under difficult shooting conditions—such as intense reflections, significant blurriness, or a scarcity of distinguishing features—there may still be instances where a perfect model cannot be achieved.
Future Directions
Bestat is committed to its mission of creating a seamless integration between the real and digital worlds. The company has established a comprehensive in-house development system that allows it to drive innovation from algorithm research through to product implementation. With a focus on continuously evolving its 3D data processing and AI technologies, Bestat aims to create a robust 3D data foundation that can be easily utilized in manufacturing and infrastructure settings.
About Bestat Inc.
- - Company Name: Bestat Inc.
- - CEO: Naoko Matsuda
- - Founded: 2018
- - Location: 6-25-14 Hongo, Bunkyo, Tokyo, 113-0033
- - Business Focus: Providing cloud services for acquiring, generating, and utilizing 3D data, 3D data processing API offerings, digital twin construction, and AI agent development related to 3D data utilization.
- - URL: Bestat Data

Topics Consumer Technology)
【About Using Articles】
You can freely use the title and article content by linking to the page where the article is posted.
※ Images cannot be used.
【About Links】
Links are free to use.