The First Proof-of-Concept Humanoid Robot Experiment in a Japanese Hospital




Introduction
ZEALS, a Tokyo-based robotics company, has embarked on an innovative project aimed at alleviating the burden on healthcare professionals. Teaming up with Quick, a venture from Tsukuba University, ZEALS conducted a groundbreaking proof-of-concept experiment at Tsukuba University Hospital from March 23 to 25, 2026. The focus was on the humanoid robot, Unitree G1, equipped with ZEALS’ Omakase OS, which is designed to enhance operational efficiency in healthcare settings.
Background of the Experiment
In the face of chronic labor shortages in healthcare, medical staff including nurses and administrative workers are overburdened with numerous indirect tasks that detract from their core responsibilities. These tasks range from patient care to logistical duties such as transporting items, wayfinding, and monitoring. Particularly during night shifts, the reduced workforce has made it challenging for healthcare professionals to dedicate sufficient time and energy to patient care—the primary focus of their roles.
This pressing need for efficiency underscores the importance of leveraging technology to tackle indirect tasks, thereby allowing healthcare workers to refocus their energies on direct patient care. The introduction of humanoid robots could be a viable solution for improving working conditions and enhancing the overall patient care experience.
In this context, Quick has dedicated itself to developing innovative solutions that are grounded in healthcare needs. Concurrently, ZEALS has focused on creating a natural interface between humans and AI, aiming to design comprehensive customer experiences in various fields. They firmly believe that the essence of future robotics lies not in mere movement, but in a robot's ability to intuitively understand and interact within human environments.
Details of the Experiment
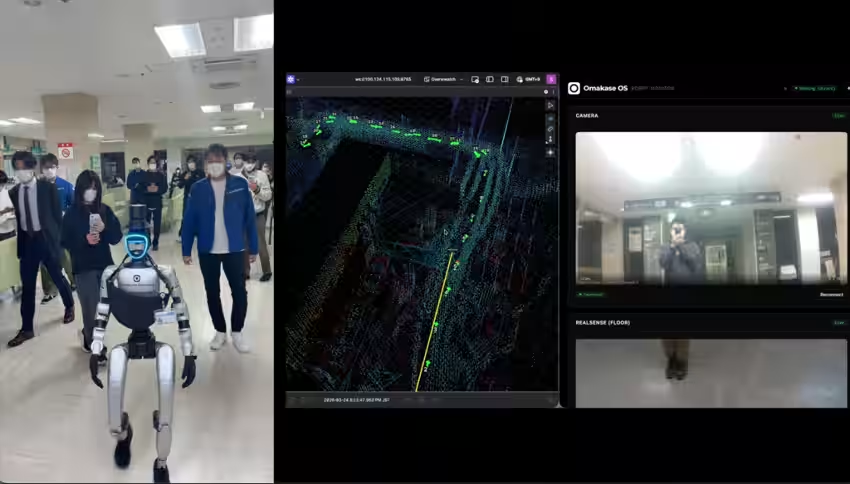
The trial at Tsukuba University Hospital was carried out nightly in the lobby from 7 PM to 9 PM over three days. It aimed to validate the capabilities of the Unitree G1 robot equipped with Omakase OS in a real-world hospital environment. Key functionalities tested included autonomous navigation, obstacle avoidance, and task assistance, aiming to assess the robot's effectiveness in a medical setting.
Among the specific tasks performed were:
- - Evaluating the robot's stability while walking on hospital floors
- - Ensuring obstacle avoidance around medical staff and equipment
- - Performing autonomous navigation to predetermined destinations, e.g., from the entrance to the blood collection room
- - Assisting in transporting medical supplies
- - Collecting feedback from hospital officials during demonstrations
The final day culminated in a demonstration attended by hospital director Dr. Yuji Hiramatsu and assistant director Dr. Kiyotaka Nemoto, who provided valuable insights from the healthcare perspective. This trial was not solely about showcasing a robot’s mobility but also involved investigating its applicability in supporting hospital operations.
Results of the Experiment
Throughout the course of the experiment, the humanoid robot exhibited promising basic abilities, confirming its potential for supporting tasks within the hospital environment. Despite minor technical issues, such as a momentary power interruption to the speaker, all primary goals were achieved successfully. Notably,
- - The robot demonstrated stable bipedal walking on hospital floors
- - It successfully navigated around obstacles like color cones and other pedestrians
- - The autonomous navigation to specified destinations was successful
- - Conversational directions and transport tasks were effectively managed
- - It adeptly detected anomalies
Feedback from hospital stakeholders indicated a positive reception of the robot's capacity for future medical applications. There were also discussions regarding the possibility of extending its functionalities to cover various indirect tasks managed by healthcare staff, opening the door for potential developments in real-world applications.
Conclusion
The proof-of-concept trial was a significant step in substantiating the viability of humanoid robots in healthcare. This initiative aligns with the ongoing push for enhanced operational efficiencies and the refining of patient care experiences in hospitals. With positive feedback and successful preliminary findings, ZEALS and Quick are poised to explore further opportunities for integrating robotics in medical facilities.
Comments from Leaders
Dr. Yuji Hiramatsu, Hospital Director
Dr. Hiramatsu expressed optimism about the potential of humanoid robots in the medical field, stating, "This demonstration has allowed us to witness how humanoid robots can play a role in easing the workload in medical environments. While challenges remain, it is clear that technological advancements are on the horizon."
Junhiro Takeda, CEO of Quick
"Our vision is to build an evolving healthcare infrastructure. This experiment highlights the interconnectedness of tasks in achieving significant impacts within healthcare. We've finally begun to touch areas previously thought unreachable."
Masahiro Shimizu, CEO of ZEALS
"The evolution of humanoid robots necessitates an intellectual framework enabling them to function seamlessly in human spaces. Our Omakase OS endeavors to infuse robots with the intelligence required for meaningful interactions in healthcare settings. We've taken an important step in demonstrating this capability during the experiment."
Future Prospects
Looking ahead, ZEALS and Quick aim to continue their collaborative efforts to facilitate the implementation of humanoid robots in healthcare—a venture that promises to alleviate existing challenges in hospital settings while enhancing patient care.




Topics Health)
【About Using Articles】
You can freely use the title and article content by linking to the page where the article is posted.
※ Images cannot be used.
【About Links】
Links are free to use.