Forcesteed Robotics and Kawasaki Heavy Industries Collaborate on Semantic Mapping Technology




Forcesteed Robotics and Kawasaki Heavy Industries Collaborate on Semantic Mapping Technology
In an exciting development in AI, robotics, and image recognition, Forcesteed Robotics, based in Koto City, Tokyo, has announced a partnership with Kawasaki Heavy Industries, also headquartered in Tokyo, to co-develop a novel "semantic mapping generation technology" for mobile robots. This partnership represents a significant progress in the field of robotics, where robots are expected to not only navigate environments but also understand them.
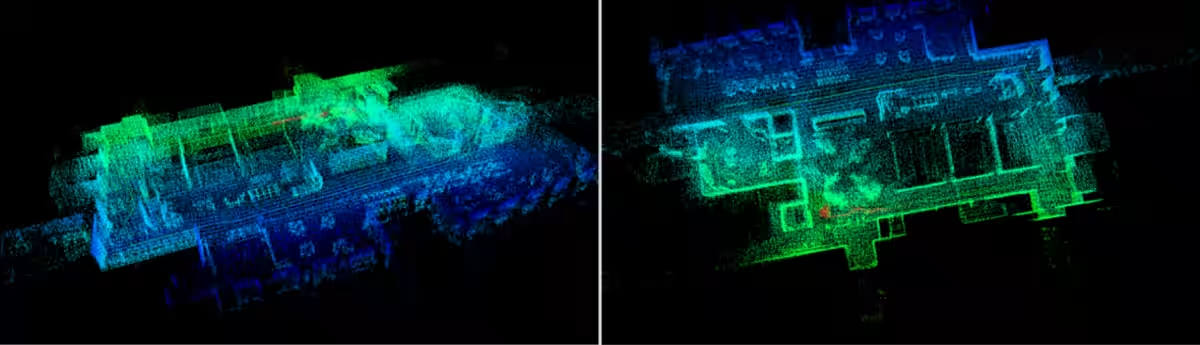
The newly established technology goes beyond traditional Simultaneous Localization and Mapping (SLAM) systems by enabling robots to create "semantic maps" through the integration of camera and LiDAR data. This step forward aims to enhance robots' autonomous functionality, allowing them to understand the significance of their surroundings as they move.
Overview and Importance of the Technology
Previously, SLAM primarily served as a tool for self-localization and geometric map construction, generating maps that contained limited structural information and lacked semantic elements. As a result, critical meaning-related data about the environment, such as passages or obstacles, was often absent.
However, recent advances in Large Language Models (LLMs) have fostered efforts to extract semantic information from image and point cloud data. The current challenge lies in systematically developing technologies for constructing semantic maps. By merging Forcesteed's expertise in AI and image recognition with Kawasaki Heavy Industries' extensive knowledge in robotics applications, the two companies are making powerful strides.
The collaboration will allow for extracting semantic information in tandem with traditional SLAM processing, where environmental features such as "corridors," "windows," and "work areas" receive meaningful labels. This approach enables efficient object search and semantic inquiries, such as identifying locations like "meeting rooms" or "shelves."
Key Features:
- - Automatic Labeling: Utilizes cameras and LiDAR to assign semantic labels (e.g., “door,” “shelf,” “corridor”) to the environment.
- - Flexible Navigation Plans: Develops movement strategies based on semantic searches (e.g., “navigate to the meeting room”).
- - Simplified Map Preparation and Enhanced Adaptability: Improves ease of creating maps and adapting to dynamic environments.
- - High Recognition Accuracy: Achieved above 80% recognition accuracy in labeled environments during indoor trials (internal validation). However, challenges remain, including computational load, camera performance in low-light scenarios, and the generalizability of semantic labels.
Future Prospects of the Technology
Both companies plan to target real-world applications for the new technology, with a focus on integrating it into indoor service robots, inspection bots, and security systems by 2027. This marks a departure from navigation reliant on conventional maps towards a future where robots can act autonomously by comprehending their environments, even without structured maps.
Continuing this trajectory, the collaboration aims to establish robots that naturally assimilate into human environments, exhibiting behaviors reflective of their understanding of surrounding situations.
CO-CREATION PARK KAWARUBA
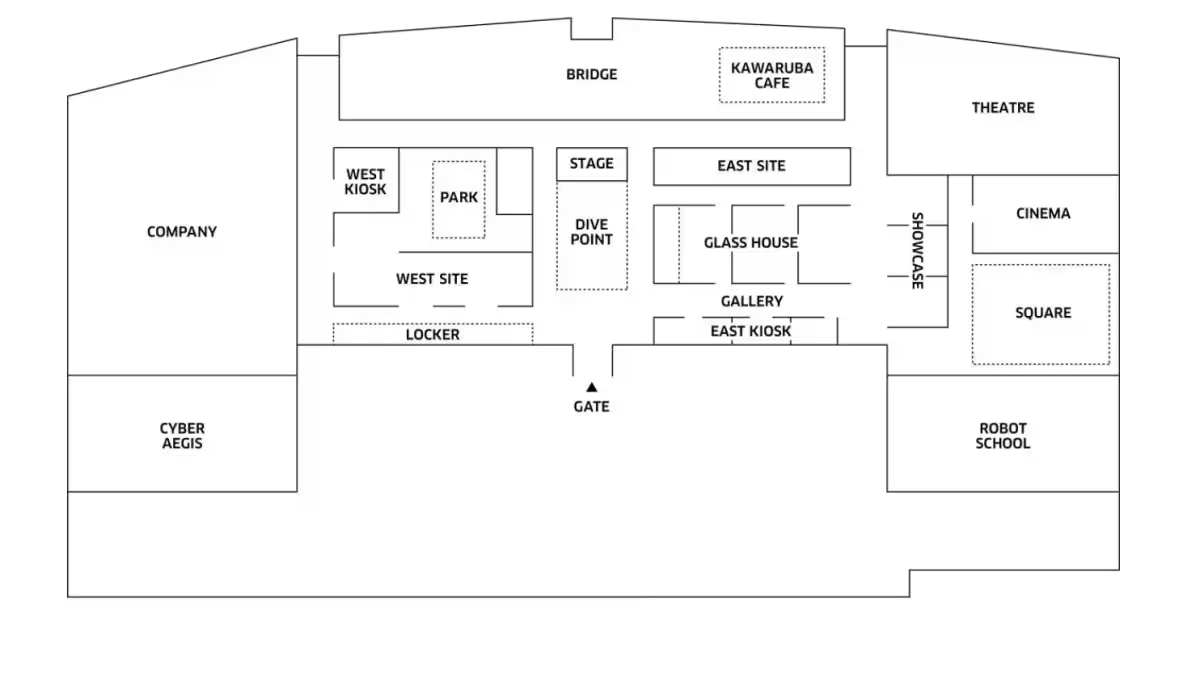
The development and trials are taking place at the CO-CREATION PARK KAWARUBA in Kawasaki, which serves as a hub for social innovation. The name "KAWARUBA" embodies the concept of a changing space, or a place for transformation, representing a commitment to solving societal issues through open innovation.
KAWARUBA is designed to cultivate new value creation alongside diverse startups, research institutions, and partner enterprises. In November 2024, Kawasaki Heavy Industries plans to further expand this vision with the opening of the "Haneda Innovation City" in Ota City, Tokyo, facilitating real-world testing and validation of technologies in fields including robotics, mobility, and environmental energy.
For additional information, you can visit the KAWARUBA website at KAWARUBA Official Site.
Contact Information
For inquiries regarding this article:
Forcesteed Robotics PR Team
[email protected]
Company Overview
- - Forcesteed Robotics
- Established: July 29, 2024
- Key Executives: Hiroyuki Oosawa, Akiko Moro
- Focus: Research and implementation of AI, image recognition, and robotics technologies.
- Website: Forcesteed Official Site
- - Kawasaki Heavy Industries
- Established: October 15, 1896
- Key Executive: Yasuhiko Hashimoto, President & CEO
- Focus: Comprehensive heavy industry manufacturer specializing in transportation, energy, and robotics.
- Website: Kawasaki Official Site




Topics Consumer Technology)

【About Using Articles】
You can freely use the title and article content by linking to the page where the article is posted.
※ Images cannot be used.
【About Links】
Links are free to use.