Innovative Research: Automating Disaster Evaluation with Robots




Transforming Disaster Response with Robotics
In a groundbreaking initiative, Pocket Queries, headquartered in Shinjuku, Tokyo, has partnered with the National Institute for Land and Infrastructure Management (Architectural Institute) in Tsukuba, Ibaraki, to spearhead a research project aimed at automating the evaluation of disaster-stricken buildings. This cooperation, dubbed "Research on Phase-Free Disaster Assessment Technologies Using Robots," seeks to integrate humanoid and quadrupedal robots into a system that can conduct inspections without human intervention.
Background and Objectives
Japan faces increasing natural disasters necessitating swift assessment of damage. Additionally, there’s a chronic shortage of expert technicians who can perform this demanding fieldwork. This joint research aligns with the Japanese government's focus on investment in disaster prevention, infrastructure resilience, and advanced technologies like AI and cybersecurity. By implementing cutting-edge physical AI and collaborative robot control, the project aims to achieve complete unmanned assessments in hazardous conditions while significantly enhancing operational efficiency.
Over the years, both partners have engaged in collaborative research to refine robotic inspection techniques and develop systems that recreate real-world environments in virtual spaces. This latest endeavor builds upon prior successes and tackles the challenges identified through earlier practical experiments.
Key Features of the Project
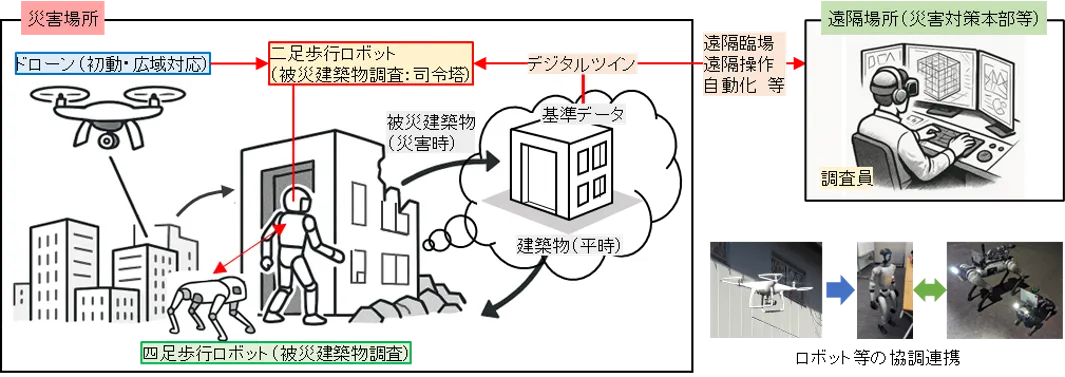
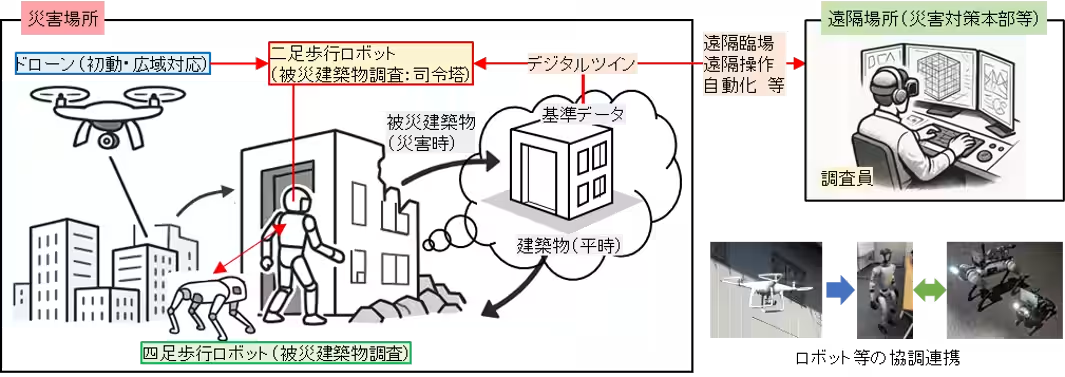
The integration of humanoid robots and quadrupedal systems is pivotal to accomplishing advanced inspections which were previously unattainable by quadruped robots alone. The aim is to enable sophisticated tasks using human-equivalent equipment for nuanced inspections and intuitive situational assessments in the field. To achieve this, the initiative will leverage a combination of drone aerial screenings and the specialized capabilities of quadrupedal robots, creating a comprehensive, phase-free unmanned assessment system applicable from normal times through to disaster response and recovery.
System Characteristics
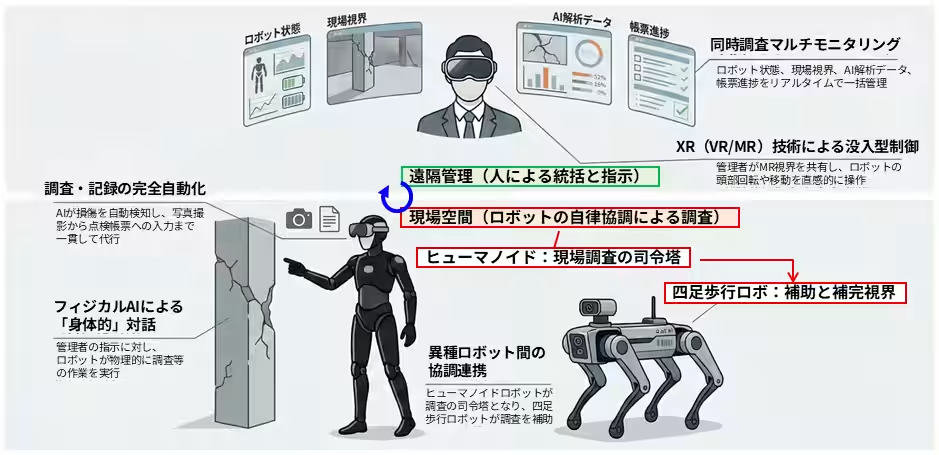
1. Intuitive Remote Operation and Physical Interaction:
Using VR and head-tracking technologies, the system facilitates low-latency synchronization for remote operators. The humanoid robot can handle human-equivalent inspection equipment directly, engaging in non-verbal cues like nodding or pointing to create strong situational awareness.
2. Collaborative Operation of Diverse Robots:
The cooperative interaction among drones for aerial scanning, humanoid robots for human-interface tasks, and quadrupedal robots for rugged terrain navigation allows for a comprehensive and dimensional assessment of disaster scenarios.
3. Complete Automation of Administrative Processes:
Starting with AI-driven image recognition for damage detection, all subsequent processes—from photographing damage to automated input into existing formats—are fully autonomous, culminating in efficient operations that can be completed with voice commands.
Current Progress and Experimental Validation
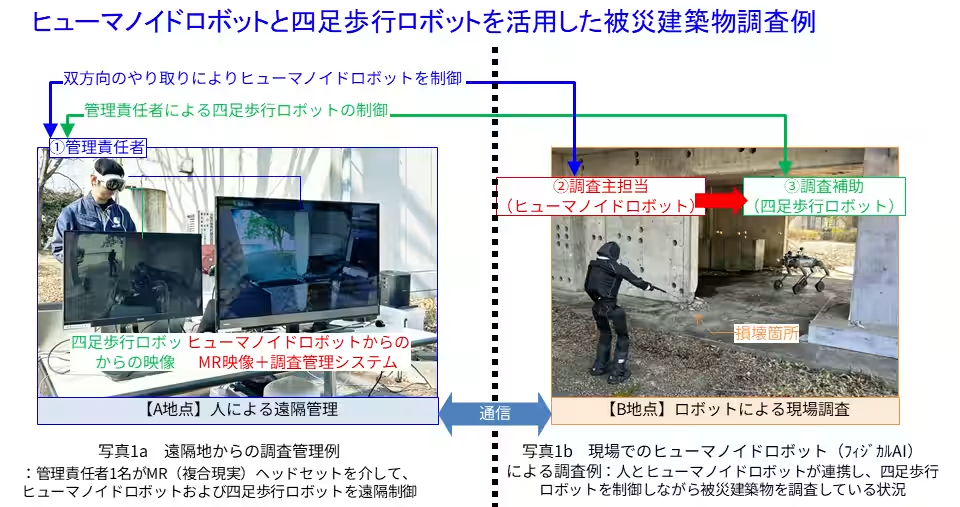
To ensure the effective implementation of this system in real field conditions, comprehensive validation experiments have been conducted to evaluate its applicability for assessing urban and structural disaster scenarios.
Phase One: Basic Validation
In the initial stage, the focus lies on verifying the robot’s fundamental functionalities, communication protocols, and sensor data acquisition capabilities while ensuring that safety protocols are in place. This has involved confirming mobility metrics, testing sensor data retrieval via LiDAR and depth cameras, and conducting preliminary damage status assessments.
Phase Two: Usability and Performance Validation
The second phase evaluates the system’s overall performance and its practical application in real-world settings. By simulating disaster conditions with quantitative assessment scales for determining tilt angles, subsidence, and deformation, a comprehensive analysis through a series of inspections utilizing both humanoid and quadrupedal robots is conducted.
The insights gained from these experiments clarify the distinctions between human-led inspections and robotic inspections, highlighting differences in visibility and data comprehensiveness. Moving forward, refinements targeting sensor calibration and stabilizing communication environments will be pursued as part of ongoing efforts to prepare for system deployment.
Conclusion
This innovative collaboration between Pocket Queries and the Architectural Institute represents a significant leap forward in leveraging robotic technology for disaster assessments. As the system evolves through further testing and refinement, it holds the potential to transform how emergency evaluations are handled, ensuring rapid, safe, and efficient operations in critical situations.
Topics Other)
【About Using Articles】
You can freely use the title and article content by linking to the page where the article is posted.
※ Images cannot be used.
【About Links】
Links are free to use.